APEC 4/12: HFGW Communications, Quantum Wormholes & Many Worlds
4:00pm PT – Robert Francis, Jr. – Lab Partners – Experimental Research Updates
To date there have been no papers published in any physics journals covering free-fall experiments with magnets. I have continued to conduct and refine my free-fall experiments reported in the February episode of APEC with magnets in several configurations and have collected significant evidence that inertial mass reduction takes place when an object is surrounded by a dipole magnetic field moving in the direction of their north to south pole.
Original Libreoffice PowerPoint Presentation
Inertial Mass Reduction when Dipole Magnets Move in the Direction of their North to South Pole
My Inspiration for Conducting Magnet Free-Fall Experiments
Lockheed Martin Senior Scientist Boyd Bushman
- Boyd Bushman in an interview in the documentary “From Here to Andromeda” stated that he conducted magnet free-fall experiments from the 5th story of a Lockheed building that showed two repulsively coupled magnets fell slower than a control object and always hit the ground last.
- It was not made clear from this interview what was the cause, an effective increase in gravitational mass or a decrease in inertial mass.
- No one on the internet who has conducted magnet free-fall experiments had determined which is taking place. I wanted to find out.
Alien Reproduction Vehicle – Fluxliner
- The “Alien Reproduction Vehicle” as discussed in Episode 1 of my YouTube Channel had an electromagnetic coil around the circumference of the craft.
- UFOs are assumed to have some sort of inertia reduction technology to enable their high acceleration rates while not crushing their occupants with excessive g-forces.
- If a magnetic field can alter inertia or gravity it would be useful for a spacecraft like the ARV to have and would partially explain the existence of the coil on the ARV.
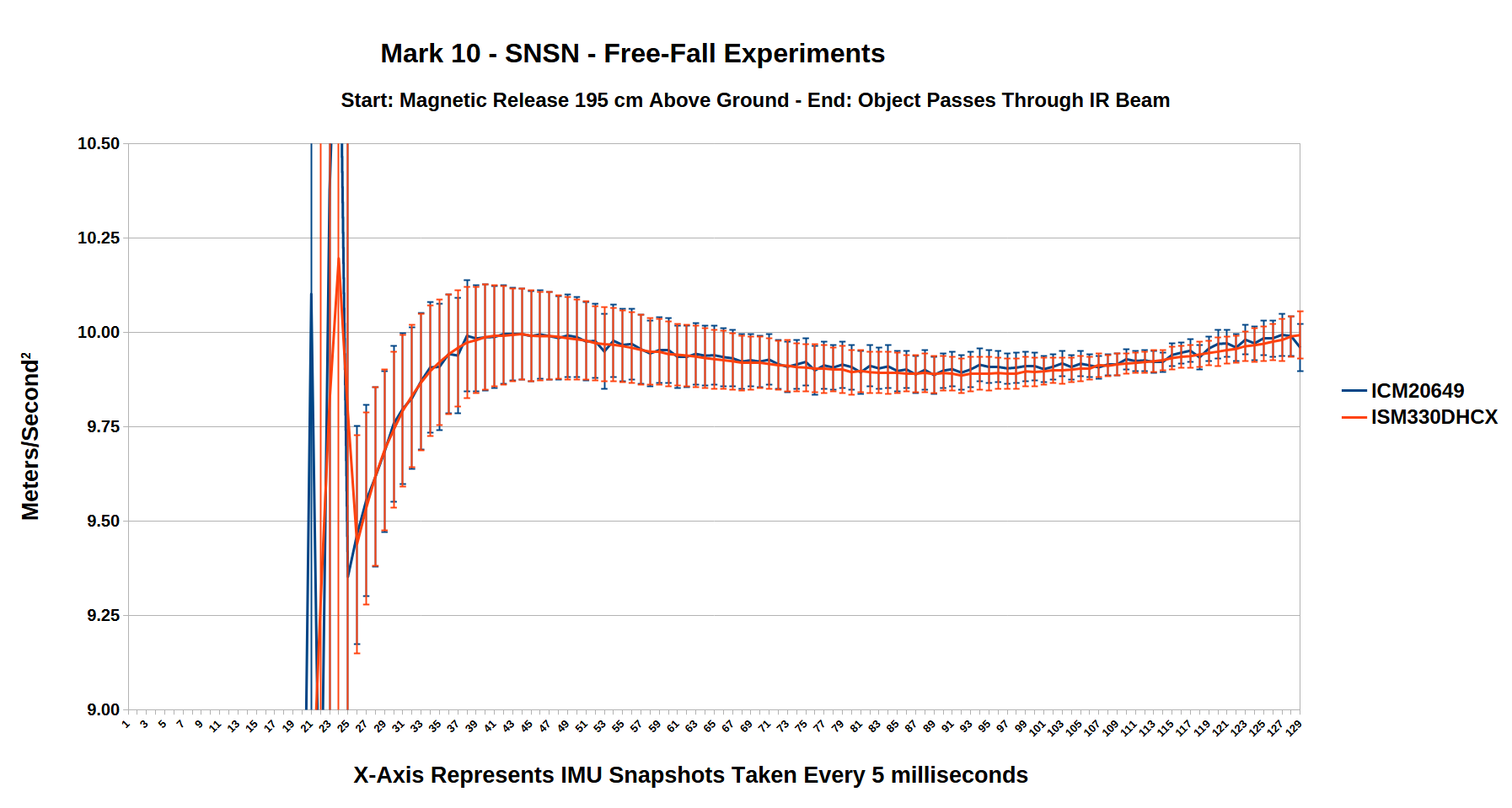
Mark 10 Magnet Free-Fall Experiment
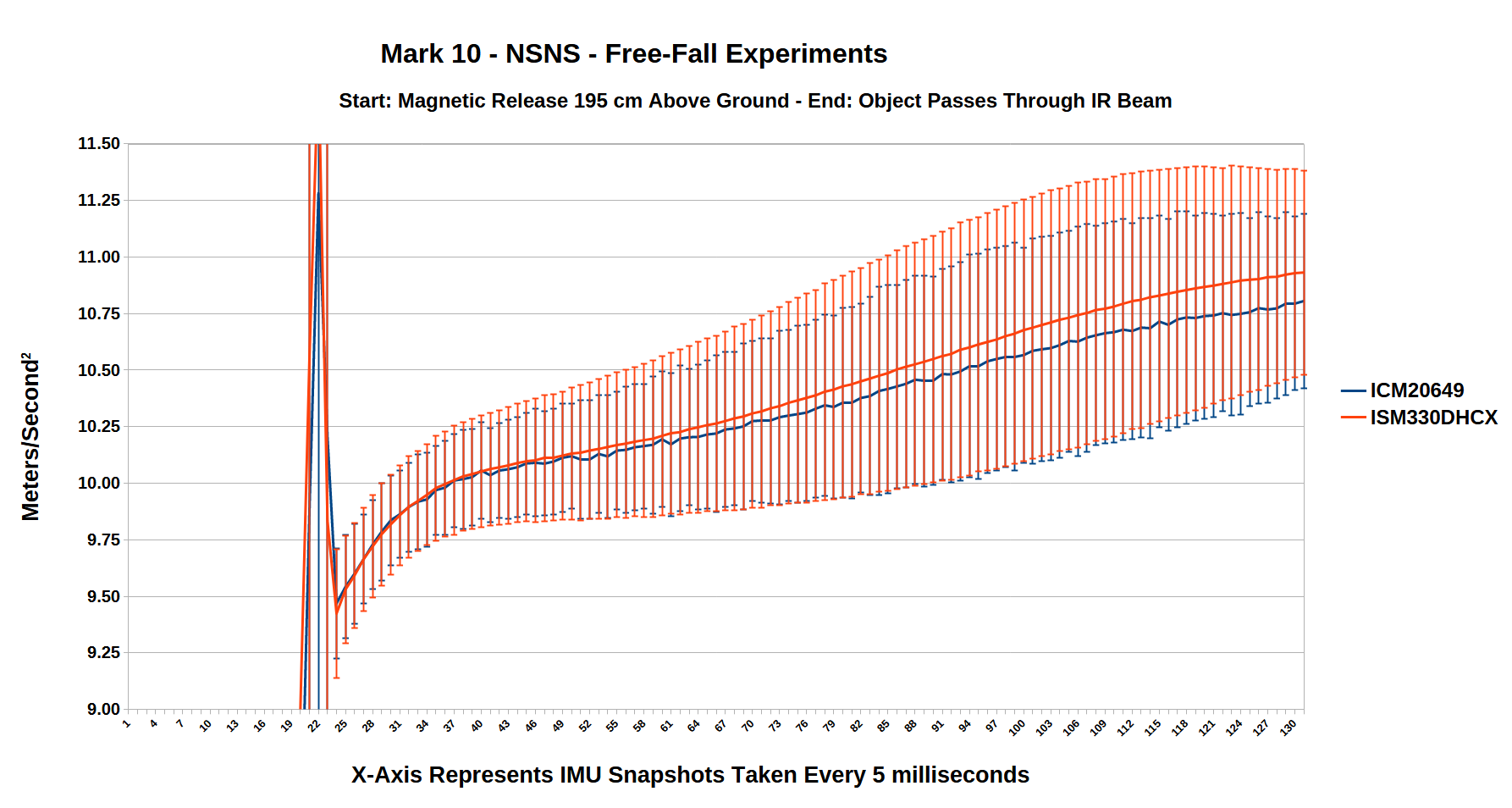
- IMU: ICM20649
-
- Max Acceleration: 11.67 m/s2
- Average Acceleration: 10.8056 m/s2
- Std Deviation: 0.386
- IMU: ISM330DHCX
-
- Max Acceleration: 11.93 m/s2
- Average Acceleration: 10.9316 m/s2
- Std Deviation: 0.451
- ANOVA: Pr(>F) <2e-16
- Magnet: 2 x N42, 2″ OD, 1/4″ ID, 1″ thick
- Drop Height: 1.95 meters
- Filter: Mahony
- Drop Method: Computer
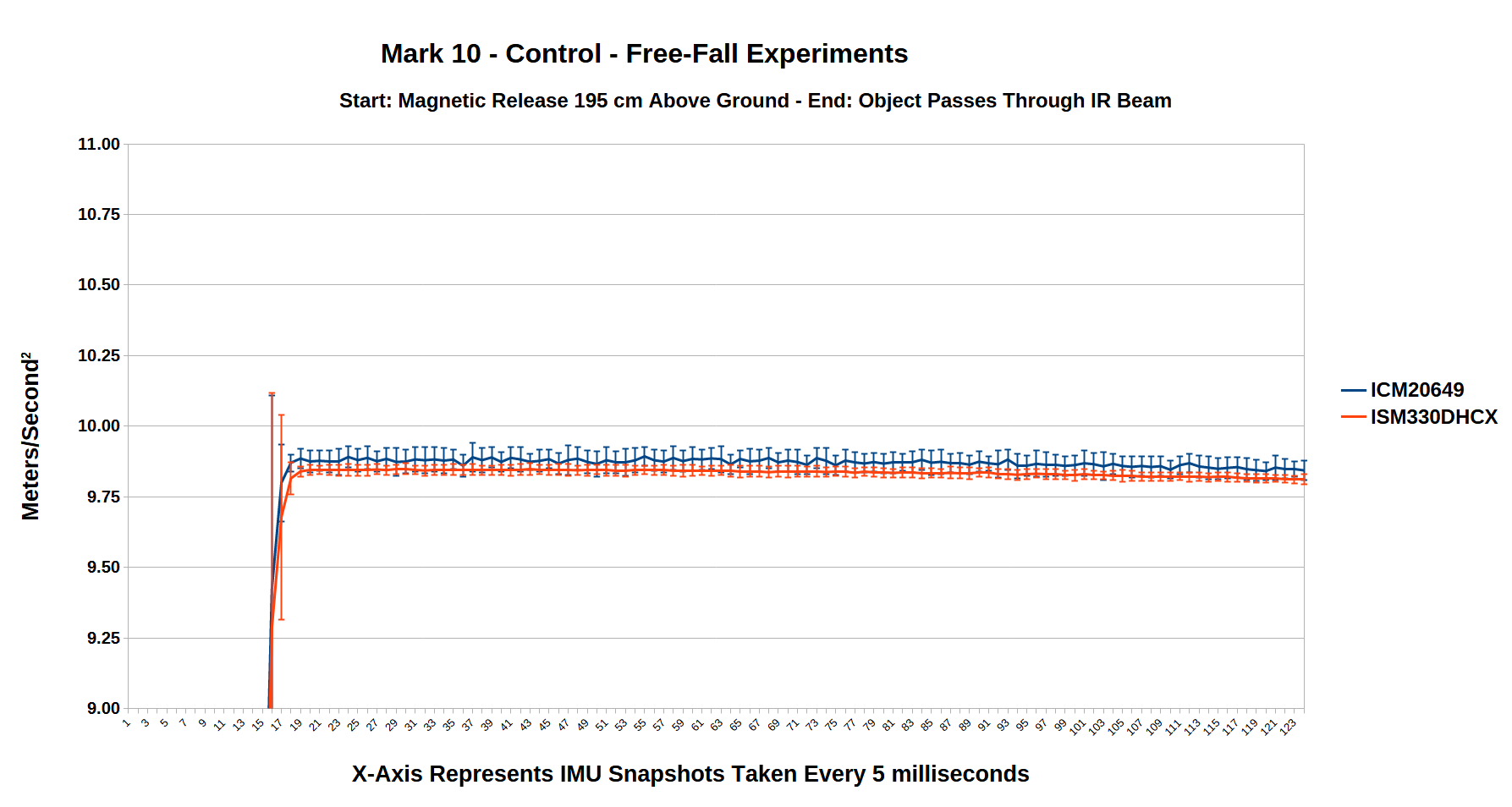
- IMU: ICM20649
-
- Max Acceleration: 10.00 m/s2
- Average Acceleration: 9.8432 m/s2
- Std Deviation: 0.035
- IMU: ISM330DHCX
-
- Max Acceleration: 9.90 m/s2
- Average Acceleration: 9.8116 m/s2
- Std Deviation: 0.017
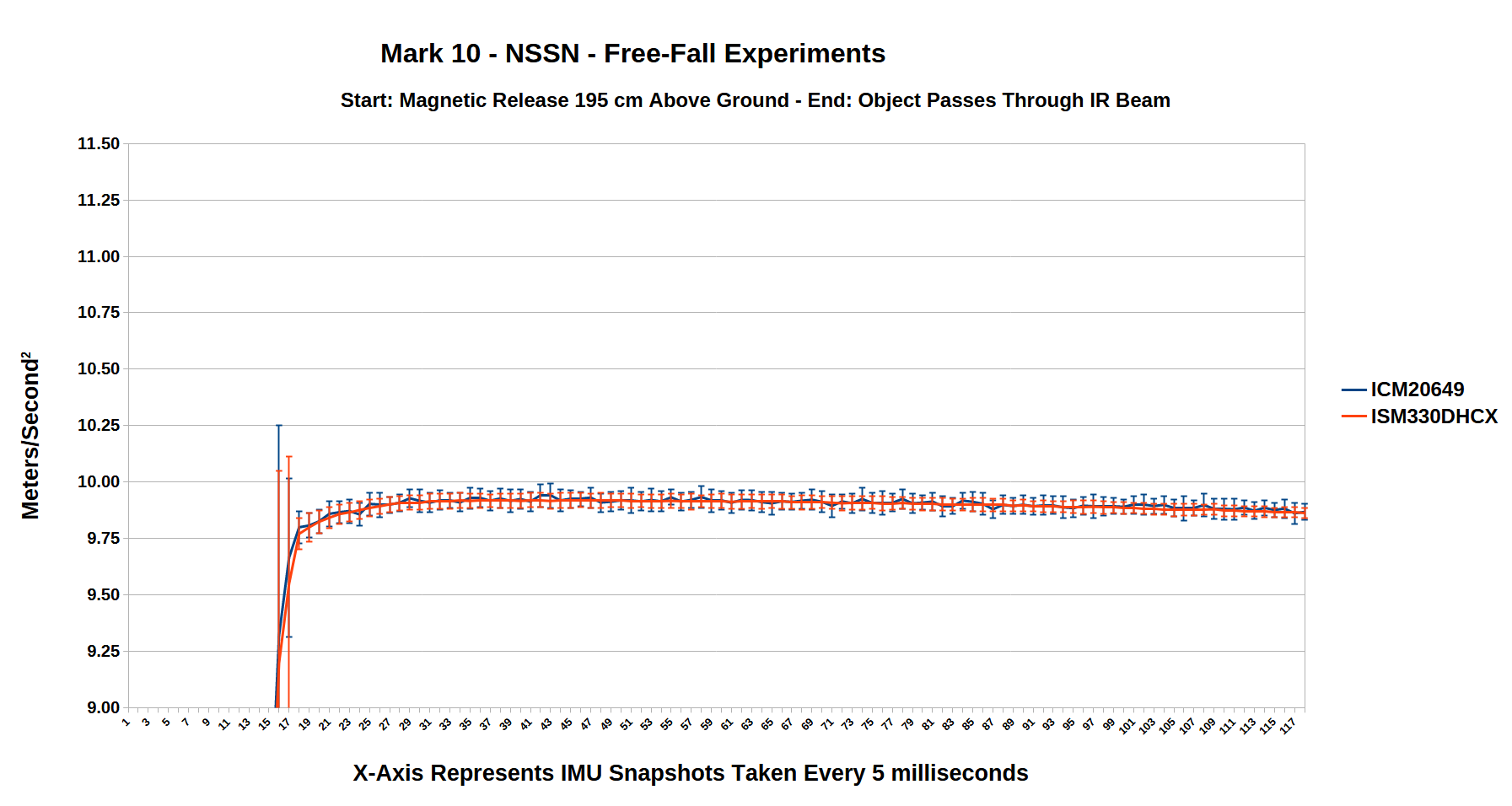
- IMU: ICM20649
-
- Max Acceleration: 10.06 m/s2
- Average Acceleration: 9.8676 m/s2
- Std Deviation: 0.035
- IMU: ISM330DHCX
-
- Max Acceleration: 10.00 m/s2
- Average Acceleration: 9.8624 m/s2
- Std Deviation: 0.023
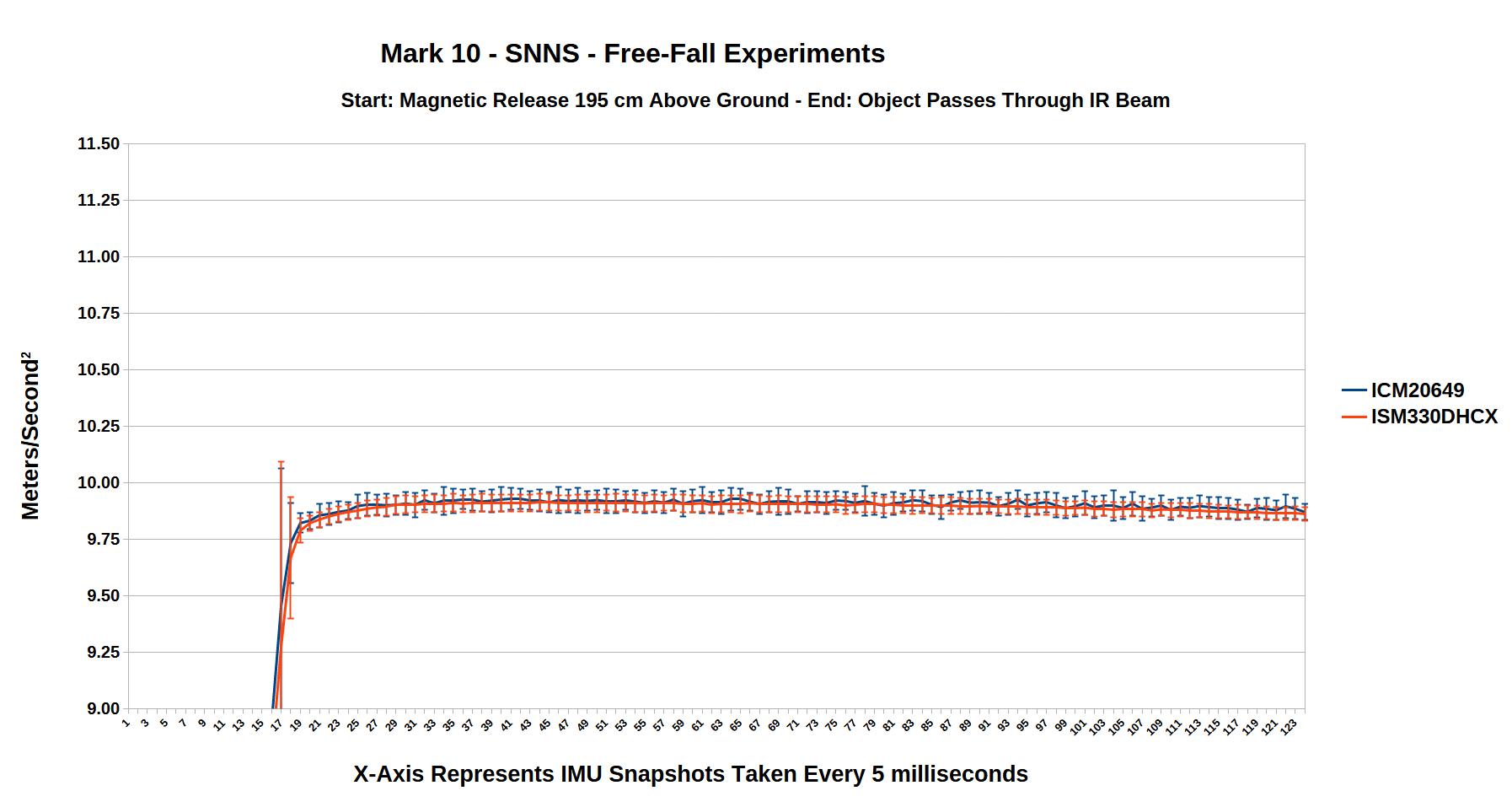
- IMU: ICM20649
-
- Max Acceleration: 10.05 m/s2
- Average Acceleration: 9.8696 m/s2
- Std Deviation: 0.035
- IMU: ISM330DHCX
-
- Max Acceleration: 9.97 m/s2
- Average Acceleration: 9.8616 m/s2
- Std Deviation: 0.029
- IMU: ICM20649
-
- Max Acceleration: 10.26 m/s2
- Average Acceleration: 9.9592 m/s2
- Std Deviation: 0.165
- IMU: ISM330DHCX
-
- Max Acceleration: 10.27 m/s2
- Average Acceleration: 9.9928 m/s2
- Std Deviation: 0.062
Experimental Methodology
The drop device consists of a wooden frame made of 2x4s with a milled out section at the top where a solenoid coil is attached via a screw. The solenoid coil magnetically couples to a steel washer on the back of the free-fall object. When the coil is turned off the object drops.
The drop device has a removable MDF board with two breadboards stuck to it that has the electronics used. The Arduino Nano 33 BLE Rev2 in the drop device controls the solenoid, is connected to the IR sensors at the bottom, has a buzzer for audio notifications of successful beam break, is connected to a microSD card to store IMU data, and is connected via a pin to an Arduino Nano ESP32 which communicates with a smartphone for video recording.
Using bluetooth the drop device Arduino communicates with the free-fall object Arduino.
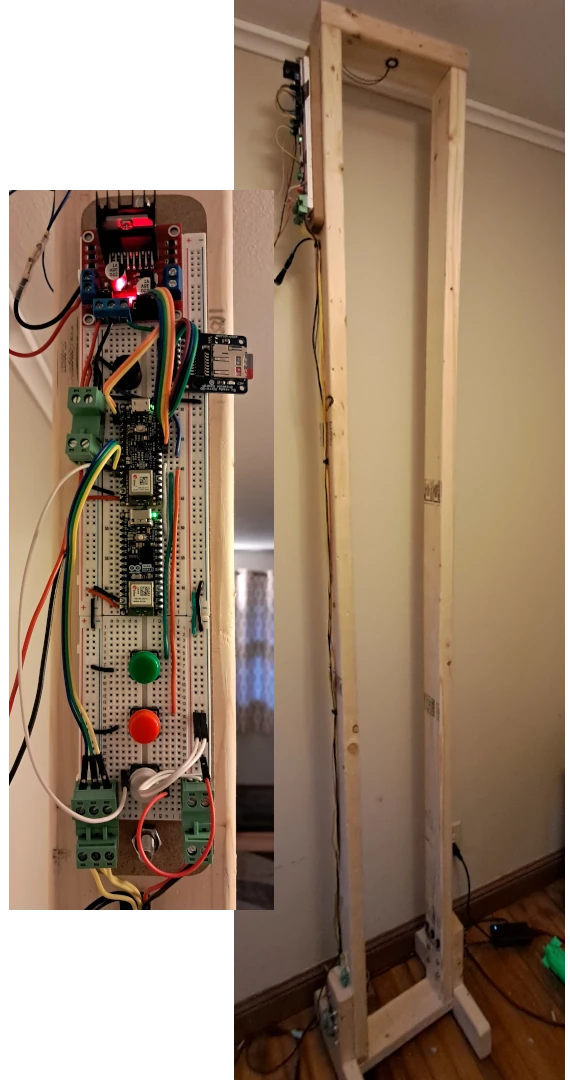
- Pressing the red button turns on the solenoid coil.
- Pressing the green button starts video recording, starts a stopwatch timer, tells the IMUs in the free-fall object to start recording, and turns off the solenoid coil.
- When IR beam is broken the timer stops, the buzzer activates, the IMU data is transferred from the free-fall Arduino to drop device Arduino, and the IMU data is written as a csv spreadsheet to the microSD card.
- Magnet: 2 x N42, 2″ OD, 1/4″ ID, 1″ thick
- Drop Height: 1.95 meters
- Filter: Mahony
- Drop Method: Computer
Problems Encountered in the Experiment
Washer not releasing from the solenoid coil after the same amount of time on every drop. This is likely due to the free-fall object magnets partially magnetizing the washer and more of a problem with NSNS and SNSN due to their stronger magnetic field.
Tilting and tumbling due to one side of the washer and solenoid magnetically sticking after object release.
IR beam breaking not occuring at the tip of the free-fall object. There are three beams but depending on how the object falls the tip of the object can pass the IR beams before a beam break is detected.

Conclusion
Next month I hope to have completed the next step in proving inertia reduction technology. I am designing and building a rotational inertia device which attaches two NS/NS magnet objects to the periphery of an Aluminum strip about 1” wide and 1/8” thick and rotates that 6” long strip at fixed RPMs in the direction of the magnet object’s north to south pole. Then I flip the magnets so the disc is rotating in the direction of the magnet object’s south to north pole at the same RPMs.
By connecting a current sensor in between the power supply and the stepper motor driver board that controls the motor, if inertia reduction is taking place then less current will be used when the magnet objects are moving in the direction of their north to south pole versus their south to north pole.
I now have a complete experiment replication guide on my website to replicate the Mark 10 experiment in its entirety.
The results of the Mark 10 experiment and the replication guide can be found at the following address:
